项目要求
任务
设计一套小车跟随行驶系统,采用 TI 的 MCU,由一辆领头小车和一辆跟随 小车组成,要求小车具有循迹功能,且速度在 0.3 ~ 1m/s 可调,能在指定路径上 完成行驶操作,行驶场地的路径如图 1 所示。其中,路径上的 A 点为领头小车 每次行驶的起始点和终点。当小车完成一次行驶到达终点,领头小车和跟随小车 要发出声音提示。领头小车和跟随小车既可以沿着 ABFDE 圆角矩形( 简称为 内圈 )路径行驶,也可以沿着 ABCDE 的圆角矩形( 简称为外圈 )路径行驶。 当行驶在内圈 BFD 段时,小车要发出灯光指示。此外,在测试过程中,可以在 路径上 E 点所在边的直线区域,由测试专家指定位置放上“等停指示”标识(见图 1 左侧),指示领头小车在此处须停车,等待 5 秒后再继续行驶。
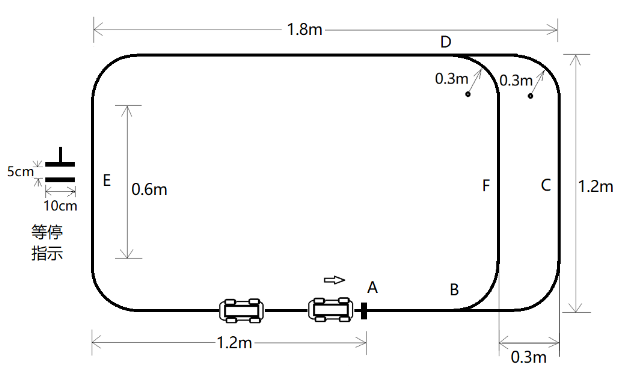
图1 小车跟随行驶场地示意图
要求
- 将领头小车放在路径的起始位置 A 点,跟随小车放在其后 20cm 处,设 定领头小车速度为 0.3m/s,沿着外圈路径行驶一圈停止,要求:
- 领头小车的平均速度误差不大于 10%;
- 跟随小车能跟随领头小车行驶,全程不能发生小车碰撞;
- 完成一圈行驶后领头小车到达 A 点处停车,跟随小车应及时停止,停止 时间差不超过 1s,且与领头小车的间距为 20cm,误差不大于 6cm。
- 将领头小车放在路径轨迹的起始位置 A 点,跟随小车放在路径上 E 点所在 边的直线区域,由测试专家指定的位置,设定领头小车速度为 0.5m/s,沿着外圈 路径行驶两圈停止,要求:
- 领头小车的平均速度误差不大于 10%;
- 跟随小车能快速追上领头小车,然后按 20cm 间距跟随领头小车行驶, 全程不能发生小车碰撞:
- 完成两圈行驶后领头小车达到 A 点停止,跟随小车应及时停止,两车停 止的时间差不超过 1s,且与领头小车的间距为 20cm,误差不大于 6cm。
- 将领头小车放在路径的起始位置 A 点,跟随小车放在其后 20cm 处,领 头小车和跟随小车连续完成三圈路径的行驶。第一圈领头小车和跟随小车都沿着 外圈路径行驶。第二圈领头小车沿着外圈路径行驶,跟随小车沿着内圈路径行驶, 实现超车领跑。第三圈跟随小车沿着外圈路径行驶,领头小车沿着内圈路径行驶, 实现反超和再次领跑。要求:
- 全程两个小车行驶平稳,顺利完成两次超车,且不能发生小车碰撞;
- 完成三圈行驶后领头小车到达 A 点停止,跟随小车应及时停止,两车停 止的时间差不超过 1s,且与领头小车的间距为 20cm,误差不大于 6cm;
- 小车行驶速度可自主设定,但不得低于 0.3m/s,且完成所规定的三圈轨 迹行驶所需时间越短越好。
- 由测试专家在路径的 E 点所在边的直线区域指定位置,放上“等停指示” 标识。然后,将领头小车放在路径的起始位置 A 点,跟随小车放在其后 20cm 处, 设定领头小车速度为 1m/s,沿着外圈路径行驶一圈,行驶中两小车不得发生碰 闯。要求:
- 领头小车的平均速度误差不大于 10%;
- 领头小车达到“等停指示”点停车,停车位置准确,误差不大于 5cm;
- 在“等停指示”处停车时间为 5s,误差不超过 1s。
说明
- 作品中的小车中尺寸不大于 15cm(宽)X 25cm(长)。小车尺寸包括小 车本体、以及小车所安装的传感器等总体的尺寸大小。
- 行驶场地上铺设白纸,行驶路径用 1cm 宽的黑色引导线来标志,可以印 刷或打印在白纸上,也可以用黑色胶带纸直接粘贴在白纸上。轨迹上的起始点 A, 用垂直贴在路径引导线的黑色标志线来标记,标志线为 2cm 宽、5cm 长。“等停 指示”用间隔 5cm 的两条 2cm 宽、10cm 长的黑色平行标志线来标记,可以事先 在一张小的纸片上打印好,测试时对接粘贴在行驶路径的引导线上即可。除题目 要求的标记之外,行驶场地上不得有其他任何指示标记。
- 跟随小车的行驶完全由领头小车指挥控制,领头小车上有启动按键和设 置按键,而跟随小车只有一个上电开关,不得有其他启动和操作按键。每一次行 驶发车时,领头小车和跟随小车按照题目要求摆放在行驶路径的指定位置,跟随 小车上电,处于等待接收领头小车指令的状态。领头小车一键启动行驶,直到整 个行驶过程结束。
- 在两个小车跟随行驶过程中,除了两个小车间的相互通信外,不得有车 外遥控和其他通信指令辅助。
- 在本题目要求 4 中,领头小车遇到“等停指示”需立即停车,停车后车身 应在“等停指示”第二条横线以内,车头超出第二条横线的距离为停车位置误差。
实现方案
本系统两辆三轮二驱小车主控制系统采用TI MSP432。通过UWB 定位模块、 HC-12 蓝牙模块、tb6612 电机驱动模块、灰度传感器和编码器并通过多传感器 融合算法解算出控制器模型所需要的参数给出PWM 的可控制流,最终实现小车 的运动控制,与此同时为了方便调试控制器参数,我们使用OLED 显示屏能够对 有关参数的调节进行有效监控。最终两个小车能够按一定速度巡线跟随且依托 于外部传感器完成相应的任务,经过反复调试和改进,循迹小车系统可靠,行 驶稳定,达到了指标要求。
方案论证
主控芯片选择
小车系统架构的选取思路第一是MCU 的性能,其中MCU 最重要的就是他 的系统主频,这直接影响到MCU 的运行速度,整个小车涉及到很多个传感器的 数据以及复杂的算法需要进行处理。如果MCU 的性能不能支持这样的运算,那 么整个系统将不能实现他的各个功能,就会导致小车系统的崩溃。
MCU 的IO 口也很重要,各个传感器的数据通过IO 口传输到对应的位置, 比如USART,I2C,SPI,GPIO 的个数。
基于以上的需求我们经过几种不同的预期方案最终讨论如下:
方案一:采用msp430,该款MCU 具有高性能、低功耗的6xx 系列旗舰 型,达到25MIPS@3.3V,配备功耗优化的创新电源管理模块和USB 控制器,配 备LCD 控制器,有256KB FLASH、18KB RAM,74Pin 引脚,功耗与5xx 系列相同, 还额外集成了电压管理模块,但是该MCU 的主频还是太低。
方案二:采用msp432MCU, 这款控制器有高速48MHZ 时钟,频率稳定可 控制性高,结合我们预期使用的传感器融合方案进行专门化设计。并且能 够提供更多的IO 口和板载外设,给我们的多传感器融合算法提供了有效的 实现平台,但同时也给我们的设计和实现带来了一定的困难。
综合上述讨论我们选择了符合我们需求的方案二。
降压模块选择
方案一: 使用线性元器件LM7805 三端稳压器构成稳压电路,给单片机 提供电压。它的输出纹波小,但是效率低,容易发热。
方案二: 使用元器件LM2596 构成稳压电路,它的效率高不容易发热, 但是输出的纹波较大。
综合对系统性能的考虑,小车依靠电池独立运行,需要高效稳压,而受输 出纹波影响较小,因此选择方案二。
小车电机选择
方案一: 选用310 电机,动力强,但是重量大。
方案二: 选用ng20 减速电机,动力稍弱,但是重量轻。
经过反复研究,考虑到保持速度的同时维持姿态,最终选择了拥有更快 转速和力矩大的310 电机。
驱动模块选择
方案一: 使用MOS 管和全桥/半桥驱动芯片搭建电机驱动,可允许通过 的电机电流大,可是结构复杂,体积较大。
方案二: 使用基于TB6612 芯片的驱动模块,模块使用简单,方便接线, 体积相对较小,但是可过电流小。
经过综合考虑,小车体积不宜过大,且经过测试,TB6612 模块的驱动 电流可以满足系统需求,因此选择方案二。
理论分析与计算
小车运动控制设计
- 按偏差的比例、积分、微分进行控制的控制器称为PID 控制器,PID 控 制解决了自动控制理论所要解决的最为基本的问题,即系统的准确性、稳定性 和实时性。根据路径识别的情况,对小车采取相应的控制,达到合理设置速度 的目的。系统根据接收测速模块的速度值,通过PID 算法进行调节,进而控制 直流电机进行转速的改变,从而控制小车加减速与转向。
本组采用增量式PID 算法。增量式PID 控制是通过对控制量的增量(本次 控制量和上次控制量的差值)进行PID 控制的一种控制算法。其基本公式为:
其中,为第 n 次输出增量,为第n次偏差,分别对应 比例、积分、微分的系数。
- 转弯控制方法
小车转弯采用差速控制方法,即通过设置不同的内侧轮和外侧轮速度改变 小车运行方向。小车前进过程中,以红外传感器检测到的轨迹变化为转向条件, 在测量得到的当前车速的基础上,分别调整内侧轮和外侧轮的的转速。内测轮 速度减去当前速度的一定百分比,外侧轮加上当前速度的一定百分比,达到差 速控制转向的目的,使小车循迹行驶。
- 灰度传感器计算位置方法
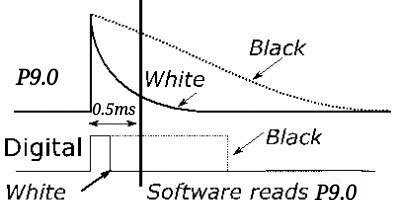
图1 灰度传感器基本控制原理
本系统利用灰度传感器检测地面轨迹。当发射的红外线照射到的目标为黑色时, 被反射回来,收到的反馈信号很快就会变为高电平;我们从等间距排布的红外 传感器阵列读取数据,赋予各红外传感器阵元以相应的位置信息。由于传感器 接近地面,仅当下方检测到黑色粗线时才输出为“1”,我们对位置信息和传感 器反馈数据进行逐位相乘,即可得到小车与轨迹的相对位置信息
小车通信模式分析
本系统采用HC-12 无线模块来进行两车的通信,工作频段为433.4MHz 至473.0MHz,具有100个通道通道步进为40KHz。
小车距离控制
本系统的距离控制采用超宽带(UWB)定位技术利用事先布置在前车的锚 节点和桥节点,与后车的盲节点进行通讯,通过测量出不同基站与移动终端的 传输时延差来进行定位。通过UWB 返回的数据对两个小车速度进行整理,把数 据打包到PID 里通过PID 的返回的PWM 对两小车进行控速,进而控制小车的距 离。
电路与程序设计
系统组成与框图
本系统总体框图如图2 所示。处理MCU 为MSP432,外围电路主要由灰度 传感器、驱动模块、稳压模块、速度检测模块,下图分析各个模块的设计的组 成。
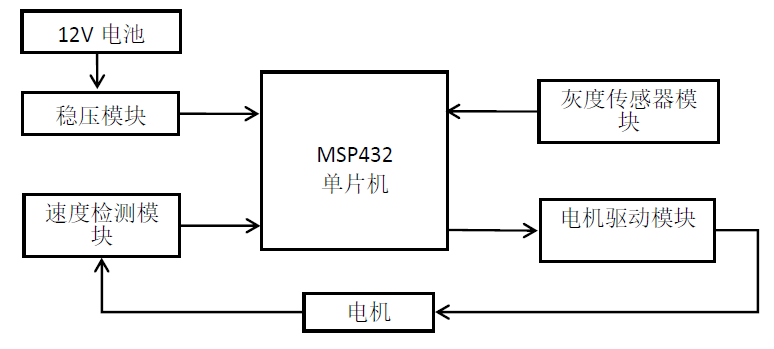
图2 系统总体框图
小车寻迹电路
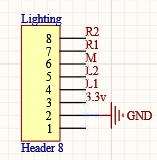
图3 小车寻迹电路
小车间通信电路
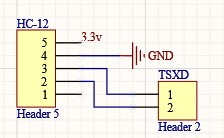
图4 小车间通信电路
小车防撞电路
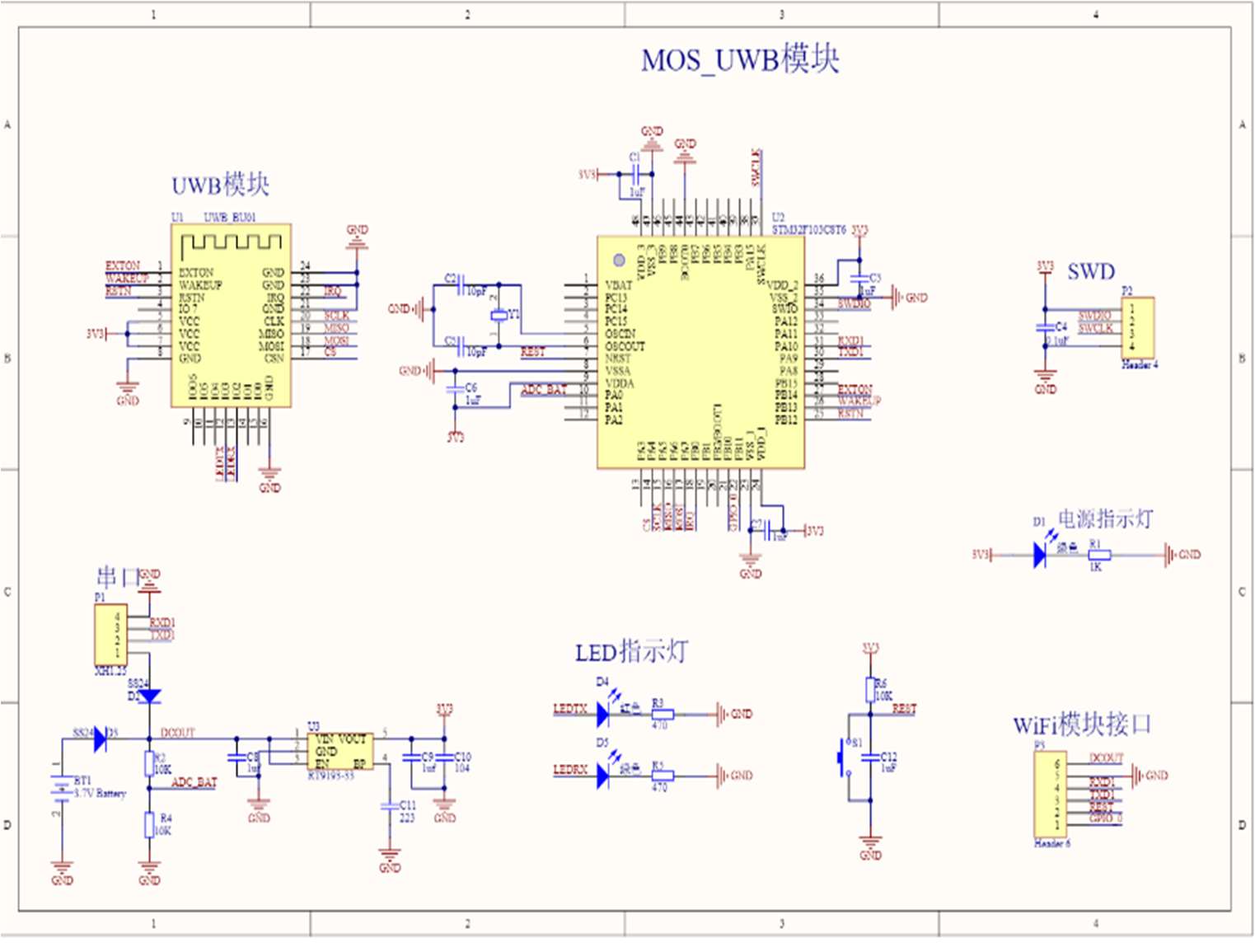
图5 小车防撞电路
程序总流程图

图6 程序总流程图
测试方案与测试结果
测试方法与仪器
仪器:示波器(DSOX2012A)、直流稳压电源(GPS-3303C)、万用表 (DT9205A)
测试方法:测试方法为先部分后整机:先将各模块电路分别进行测试, 确保能实现功能后,组装好小车,烧录程序;再将小车进行整体测试。将小车 放在跑道上,首先测试小车寻迹功能是否完整,其次在测试双车系统的测距功 能是否完好,分别去测试小车的速度和两车停止时的距离的误差。不断设定小 车的速度,重复上诉操作
| 测试次数 | 目标时间/s | 实际时间/s | 停车点两车间距误差/cm |
|---|---|---|---|
| 1 | 18 | 16 | 2.6 |
| 2 | 18 | 17 | 1.0 |
| 3 | 18 | 18.6 | 0.6 |
| 测试次数 | 目标距离/cm | 目标时间/s | 实际时间/s | 停车点误差/cm |
|---|---|---|---|---|
| 1 | 20 | 24 | 20 | 1.3 |
| 2 | 20 | 24 | 16.1 | 1.6 |
| 3 | 20 | 24 | 19.3 | 2.6 |
| 4 | 20 | 24 | 22 | 1.0 |
| 5 | 20 | 24 | 23 | 0.6 |
| 6 | 20 | 24 | 24.3 | 0.6 |
结果分析
各部分硬件电路都测试正常,能实现各自的功能。代码编写正确无误, 能实现预期功能,小车可以实现寻迹与追踪功能,并且到达制定位置停止,蜂鸣 器响,速度也能到达制定要求。该系统基本实现了题目的要求,小车行驶平稳, 性能良好。但在一些弯道处有卡顿,所以在程序与硬件性能上进一步优化。