プロジェクトのタスクと要件
タスク
運動目標制御と自動追跡システムを設計・制作する。システムは、模擬目標運動の赤色光点位置制御システムと自動追跡を指示する緑色光点位置制御システムで構成される。システム構造の概略と配置位置は図1(a)を参照。図中の2つのレーザーペンはそれぞれ独立した2次元電動ゴンドラル台上に固定されている。
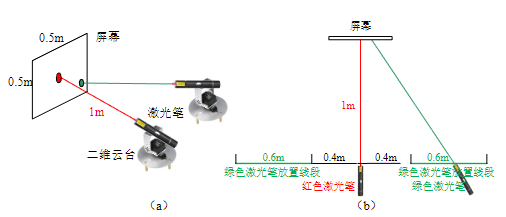
図1 運動目標制御と自動追跡システムの構造概略と配置位置図
赤色レーザーペンから発射される光点は、運動目標を模擬するために使用され、光点は前方1mの白いスクリーン上に落ち、光点の直径は≤1cmである。赤色光点位置制御システムは、光点がスクリーンの範囲内で任意に移動できるように制御する。
緑色レーザーペンから発射される光点は、緑色光点位置システムによって制御され、スクリーン上の赤色光点を自動追跡し、目標の自動追跡効果を指示するために使用され、光点の直径は≤1cmである。緑色レーザーペンの配置線は図1(b)に示されており、この線はスクリーンと平行で、赤色レーザーペンの両側にあり、赤色レーザーペンからの距離は0.4mより大きく、1mより小さい。緑色レーザーペンは2つの配置線上の任意の位置に配置できる。
スクリーンは白色で、有効面積は0.6×0.6m2以上である。鉛筆を使ってスクリーンの中心に0.5mの正方形を描き、スクリーンの枠を示す;描かれた正方形の中心を原点とし、鉛筆で原点の位置を描き、使用される鉛筆の痕跡の幅は≤1mmである。赤色、緑色光点位置制御システムは互いに独立しており、どのような方法でも通信してはならない;光点の直径は1cm未満である;スクリーン上には電子部品がない;制御システムはデスクトップコンピュータやノートパソコンを使用してはならない。
要件
基本要件
運動目標位置のリセット機能を設定する。この機能を実行すると、赤色光点はスクリーン上の任意の位置から原点に戻ることができる。光点の中心と原点の距離誤差は≤2cmである。
運動目標制御システムを起動する。赤色光点は30秒以内にスクリーンの四辺を時計回りに一周移動し、移動中の光点の中心と辺の距離は≤2cmである。
約1.8cm幅の黒色電工テープをA4紙の四辺に沿って貼り、A4ターゲット紙を構成する。このA4ターゲット紙をスクリーン上の任意の位置に貼り付ける。運動目標制御システムを起動し、赤色光点は30秒以内にテープを時計回りに一周移動する。
上記のA4ターゲット紙を任意の回転角度でスクリーン上の任意の位置に貼り付ける。運動目標制御システムを起動し、要件は3と同じである。
発展部分
運動目標位置をリセットし、ワンクリックで自動追跡システムを起動し、緑色光点が2秒以内に赤色光点を追跡し、追跡成功時に連続音声と光の通知を発する。この時、2つの光点の中心距離は≤3cmである。
運動目標を基本要件3~4の動作を繰り返す。緑色レーザーペンの発射端はその配置線上の任意の位置に配置でき、同時に運動目標と自動追跡システムを起動し、緑色光点が赤色光点を自動追跡する。システム起動2秒後、追跡成功し、連続音声と光の通知を発する。
運動目標制御システムと自動追跡システムには一時停止ボタンを設置する。一時停止ボタンを同時に押すと、赤色と緑色光点は即座に停止し、2つの光点の中心距離を測定する。
実現案
選択された課題の技術パラメータ要件に対応し、本設計はESP32-S3マイクロコントローラをシステム全体の制御コアとして、オレンジパイ、NVIDIA Jetson、ブラシレスDCモーター、2次元ゴンドラル、RGBカメラなどのハードウェアデバイスを選択し、C++、Python3.6を組み合わせてプログラミングし、設計要件を良好に実現できる。テストにより、A4ターゲット紙がスクリーン上のどの位置にあっても、設計されたシステムはターゲット紙を効果的に認識でき、ゴンドラル制御の赤色光点は30秒以内にターゲット紙上で時計回りに運動を完了できる。さらに、色空間変換、二値化処理、ガウスフィルタリングなどの画像処理アルゴリズムを採用することで、設計されたシステムは赤色と緑色光点の認識と運動追跡を良好に実現でき、追跡過程で異なる光点の中心距離を常に3cm以内に保つことができる。
方案论证
本システムは主にモーター選択、画像処理モジュール、主制御チップ選択を論証し、その他の周辺ハードウェアは通常の設計である。
モーター選択
方案1:サーボモーターをゴンドラルの主要な運動構造部品として使用する
サーボモーターは位置フィードバックを持つモーターで、電動機、位置センサー、制御回路で構成され、電動機の角度を正確に制御できる。しかし、サーボモーターの制御過程では運動速度が比較的遅く、安定性、精度などが相対的に低いため、課題の技術指標とチームメンバーの試験的テストにより、サーボモーターを使用するとレーザーポイントの運動中のリアルタイム位置の高精度制御要件を満たせないことが判明した。
方案2:ステッピングモーターをゴンドラルの主要な運動構造部品として使用する
ステッピングモーターは電気パルス入力型のモーターで、パルス数を変更することで回転角度と速度を制御でき、高い運動精度を持つ。しかし、ステッピングモーターのみではレーザーポイントの安定した閉ループ制御を良好に実現できないため、他のセンサーと組み合わせてテストする必要があり、大きな累積誤差が発生しやすい。また、ステッピングモーターは運動速度、動的応答、失歩問題、電磁干渉などに欠点がある。
方案3:ブラシレスDCモーターをゴンドラルの主要な運動構造部品として使用する
ブラシレスDCモーターは電子整流器を通じてモーターのローター位置を制御できる。ブラシレスモーターのローター上の永久磁石とステータ上のコイルは電子整流器を通じて交互に励磁され、モーターの回転を実現する。前述の2つの方案に比べ、ブラシレスDCモーターは高効率、高トルク、高速度の特徴を持ち、PWMとPIDアルゴリズムの制御を通じて、課題のレーザーポイントの迅速で正確な移動と追跡をより良好に満たすことができるため、本設計ではブラシレスDCモーターを2次元ゴンドラルの主要な運動構造部品として選択する。
画像処理モジュール
方案1:OpenMVの内蔵処理モジュールを採用する
OpenMVはPythonプログラミング言語に基づく低消費電力画像処理モジュールで、ARM Cortex-M7プロセッサを搭載し、リアルタイム画像処理機能を備え、画像ノイズ除去、色認識、QRコード・バーコード認識などを実現する。しかし、チームメンバーのOpenMVの初期テスト結果によると、この画像処理モジュールのカメラ性能は一般的で、環境シーンの光源変化に対する感度が十分でないため、レーザー認識の過程でレーザー出力の影響を受けやすく、認識精度が低下する。
方案2:K210の内蔵処理モジュールを採用する
K210はRISC-Vアーキテクチャに基づくシステムオンチップで、デュアルコア64ビットRISC-Vプロセッサ、画像処理ユニット、人工知能サポート機能などを備え、市場で主流の画像処理モジュールである。しかし、K210の内蔵カメラ性能も十分でなく、フラッシュが小さく、大きなファームウェアを書き込むと時々フリーズしたり、ハングアップしたりするため、開発環境と下位機間の接続通信も安定しない。
方案3:オレンジパイ/NVIDIA Jetsonをプロセッサとして、外部高解像度カメラモジュールを接続する
OpenMV、K210など市場で一般的なカメラ処理モジュールに比べ、外部高解像度RGBカメラモジュールはより高い画像解像度を持ち、画像認識タスクに適している。設計されたシステムが異なる出力のレーザーモジュール、異なる光源環境シーンに適応できるように、本設計では外部高解像度カメラモジュールを画像取得ユニットとして、オレンジパイ/NVIDIA Jetson組み込みシステムを画像処理ユニットとして選択する。
主制御チップ選択
方案1:51シリーズマイクロコントローラを採用する。
51マイクロコントローラはアーキテクチャがシンプルで、チップ内外のリソースが限られており、多くの機能を外部拡張する必要があり、I/Oポートが少なく、クロック精度が低く、演算速度が遅く、記憶容量が小さいため、各種組み込みシステムや小型プロジェクトにのみ適しており、本設計のリアルタイム性と運動精度の要件を良好に満たせない。
方案2:STM32マイクロコントローラを選択する
STM32は意法半導体が提供する32ビットARM Cortex-Mコアマイクロコントローラシリーズで、高性能、低消費電力、信頼性が高いなどの特徴を持つ。しかし、STM32のプログラミング複雑性は比較的高く、コードの再利用性が低いため、比較的短い設計時間制限内では、複雑なプログラム構造がソフトウェア・ハードウェアデバッグの安定性に影響を与えやすい。
方案3:Esp32マイクロコントローラを選択する
Esp32はエクシンクスが自主開発した一連のチップマイクロコントローラで、低コスト、低消費電力、豊富な外付けインターフェースを備え、Arduinoフレームワークと互換性があり、プログラミング複雑性が低く、C++プログラミングによりコードの再利用性が高いなどの特徴を持ち、短時間内で高安定性、リアルタイム性のシステム開発に適している。
システム設計と実現
ハードウェアシステム設計
設計されたシステムが実現する機能を総合的に分析し、構築されたハードウェアシステムの全体的なブロック図は図一に示されている:
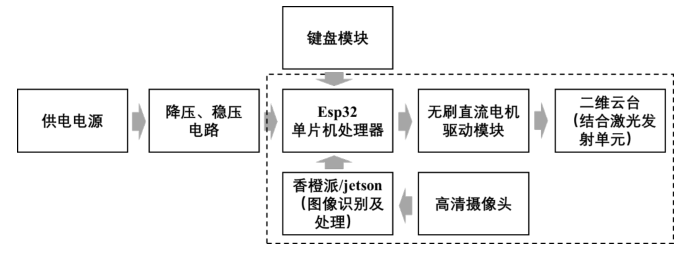
図一 システム全体ハードウェア設計ブロック図
その中で、電源は11.3V電源モジュールを採用し、降圧、安定化回路を通じて分圧と安定化を実現し、生成された電圧をマイクロコントローラプロセッサ、ブラシレスDCモータードライブモジュール、ブラシレスDCモーター、画像プロセッサに供給する。ボタンモジュールはマイクロコントローラI/Oに直接接続され、レーザーのリセット、異なる設計機能の迅速な切り替えなどを実現するために使用される;オレンジパイ/Jetsonは高解像度カメラの画像情報を受信し、画像処理アルゴリズムを通じてレーザーの色、位置の迅速な認識、判断を実現し、認識結果をマイクロコントローラプロセッサに伝送する;マイクロコントローラプロセッサは異なるデューティ比のPWM信号を生成し、ブラシレスDCモータードライブモジュールに出力し、2次元ゴンドラルの迅速な運動を駆動し、最終的にシステムのすべての機能を実現する。
ソフトウェアシステム設計
A4ターゲット紙位置認識
A4ターゲット紙の外側の枠には黒色テープが貼られており、白色背景板と大きな色のコントラストがあるため、OpenCVの内蔵画像分割関数を使用すると、A4ターゲット紙の黒色テープの内側と外側の矩形枠の4つの角点のピクセル座標を比較的容易に抽出できる。取得したピクセル座標が良好に一対一に対応できないため、自主設計の矩形擬合アルゴリズムを使用して黒色テープの中心経路を擬合する。具体的な方法は、内側と外側の矩形のピクセル座標を以下の形式で記録する:
2点間の距離計算を通じて、同一位置の内側と外側の対応する角点座標を確定し、計算式は以下の通り:
内側と外側の矩形の4つの角点の並び順に基づいて、黒色テープの中心経路の矩形角点座標を計算し、ピクセル間の直線接続を通じて完全な矩形経路を描き、逆方向にこの矩形枠上のすべてのピクセル座標を走査し、下位機に完全な運動経路を提供する。アルゴリズムのフローチャートは図二に示されている。
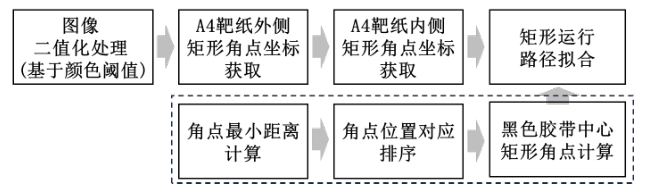
図二 A4ターゲット紙位置認識アルゴリズム
レーザー追跡
本設計のレーザー追跡機能は主に画像認識アルゴリズムを通じて実現され、高解像度カメラがリアルタイムビデオを取得した後、隣接時間の画像データを抽出し、抽出した画像フレームをRGB色空間からHSV色空間に変換し、ガウスぼかしと中央値フィルタリングを適用して画像ノイズを低減し、画像のエッジを滑らかにする。次に、形態学的操作(閉運算、開運算、膨張)を使用してノイズをさらに除去し、画像のレーザーと背景のコントラストを増加する。最後に、しきい値処理を通じて画像を二値化画像に変換し、一定の面積範囲を満たす輪郭を見つけ、レーザーの重心を計算する。処理フローは図三に示されている。

図三 レーザー追跡アルゴリズム
テスト方案及びテスト結果分析
テスト方法
選択された課題のテスト指標要件に従い、基本要件部分と発展部分の光点中心と原点の距離、光点中心と辺の距離、光点とテープの距離、2つの光点中心の距離をそれぞれテストし、すべてのテストを9回繰り返し、手動で誤差結果を測定する。
テスト結果
基本要件テストと発展部分テストはそれぞれ以下の通り:
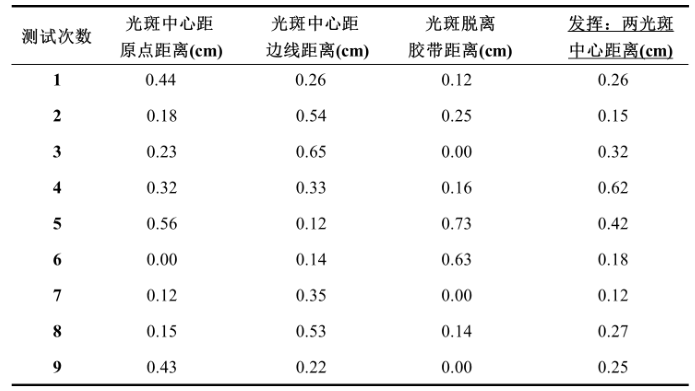
基本要求テストと発展部分テスト
複数回の実際の試験結果によると、設計されたシステムは基本テスト部分と発展部分の両方で良好なテスト効果を示し、発生した試験誤差はすべて許容範囲内であり、システムは良好なリアルタイムテスト精度を持つ。
依然として存在する問題
ボタンによる一時停止テストを採用したため、テスト結果のリアルタイム性と実際の運転効果には一定の時間差があり、取得した結果は実際のテストよりもわずかに小さい可能性があることに注意する必要がある。開発時間が限られているため、本システムはモーターの制御に角度閉ループ制御のみを採用し、速度閉ループ制御を追加していない。したがって、角度の制御精度は速度制御よりも著しく高い。また、本設計で使用されるオレンジパイとJetsonのコストが比較的高いため、後続の改善では低コスト方案を考慮する。
総括
本設計の運動目標制御と自動追跡システムはESP32-S3マイクロコントローラをシステム全体の制御コアとして、外部高解像度カメラを画像取得デバイスとして、オレンジパイ/Jetsonを画像のリアルタイム処理に使用し、ターゲット紙中心運動経路擬合アルゴリズムを自主設計し、選択された課題の主要機能を比較的正確に実現できる。開発時間が限られているため、本システムはモーターの制御に角度閉ループ制御のみを採用し、速度閉ループ制御を追加していないため、後続の最適化では低コストの双閉ループ制御方案を重点的に考慮し、システムの構築コストと運転精度を向上させる。